Rotapod
The rotating hexapod
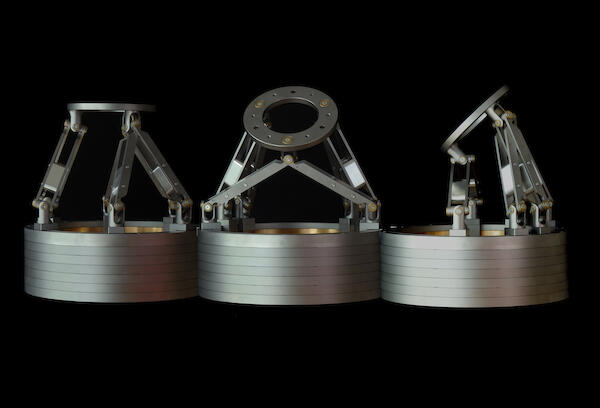
The Rotapod is a programmable positioning system. Its six axes are all moved simultaneously, moving parallel kinematically. The Rotapod has a patented drive technology with six independent drive rings. They allow up to six (+ 1 ) directions of movement to be used simultaneously during positioning. All seven degrees of freedom can be positioned simultaneously or individually. The movements can be combined with each other, so that complex wobbling movements or simple linear movement in one axis are possible. Unlike all other known drive technologies, the motors of the Rotapod are stationary during the movements. No motor or sensor cable needs to be moved. Cable breaks are a thing of the past.
Structure

Scalable from a few millimeters to several meters in diameter
The design is similar to that of a hexapod. However, with the Rotapod, the leg length is not changed, but the position of the foot points is shifted. This changes the position of the movement plane. The setup can be designed according to your specifications. The nodal points can be attached directly to a device or integrated into a setup. The movement possibilities are defined by the diameter of the base, the diameter of the head node points and the leg length.
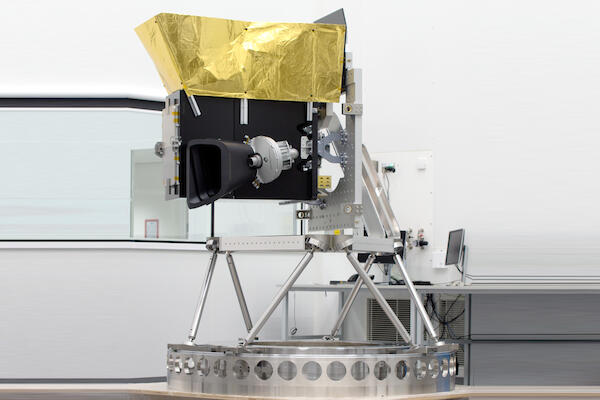
Rotapod for Sentinel 4 | 650 kg load with µm accurate positioning | ⌀ 2.2 meters
The base rings can be either roller or ball bearing depending on the application. The ball bearing is suitable for high loads and high accuracies, while the roller bearing is the less expensive but lower-load variant. In special cases, air or friction bearings are possible.
Due to its scalability, the Rotapod meets a wide range of requirements. Adaptation to the correct load is individually possible through the choice of bearing, the number of balls in the main bearing and the design of the pivot points.
Drive
The Rotapod can be driven with different types of motors. The type of motor used depends on the desired requirements and your task. High dynamics with fast movements are just as possible as powerful, precise positioning. The cable routes from the motors to the control system are short, and susceptibility to faults is reduced to a minimum. Due to the scalability of the Rotapod, drives with a few watts up to several kilowatts are possible.
Control system

Different interfaces are possible, e.g. LabVIEW®, EDEN protocol ...
One of the most outstanding features of the Rotapod is its intelligence. The algorithms for the control of the six motors with seven degrees of freedom is calculated with powerful hardware. Both the position calculation and the user programming are performed on the same computer.
An industrial PC is used to control the rotapod, which calculates the position data and passes it on to both the controller and the 3D graphics. Depending on the application, control is possible via a desktop PC or via a mainframe computer. The position algorithms calculate position, acceleration and speed of the individual setting rings. The 3D graphics is built based on this core data. It therefore represents a real simulation of the data. The control core uses the same results from the position algorithm and generates the data for the drives.
The hardware allows different connections. With Profibus, Ethernet, EtherCAT or even CAN-Open the Rotapod control can also be integrated into your network.
An implementation of LabVIEW® is in preparation.
Applications
Rotapod is useable for following topics: Automation, Mechanical Engineering, Science/Research, Space Technology.
The Rotapod is a device that can be designed specifically for your task, problem or application. Positioning paths, possible loads or accuracies, coupling to a network or operation as stand-alone depend on your tasks. We will gladly make you an offer for your Rotapod.


